Dash Robotics

design team | Paul Birkmeyer / Andrew Gillies / Nick Kohut
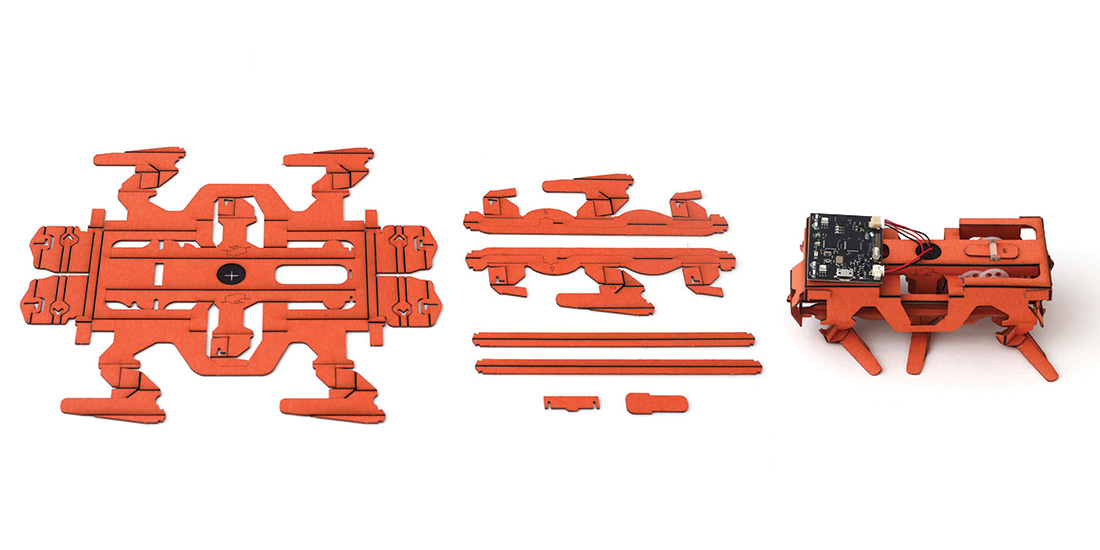
 The Dash Robotics team came together as graduate students in EECS’s Biomimetic Millisystems Lab, creating minirobots inspired by birds that fly; geckos that climb straight up walls and cross ceilings upside down; and fast, agile, nearly unbreakable cockroaches. It was Paul Birkmeyer’s idea to make a cockroach-like — but much cuter — remote-controlled running robot, its structural parts cut from a flat sandwich of flexible plastic and poster board. Teammate Nick Kohut says that when they put on demonstrations at middle schools, “The kids went nuts.” An educational-toy startup was born, hampered only because “we’re engineers; we could do lots of stuff, but we had no business experience.” The Foundry@CITRIS connected the dots with advice, seed money and access to work space and rapid prototyping. Then it came time to get formal: each member jotted down, in secret, who should do what. They agreed perfectly, says Kohut, who became CEO and handles external relations. Birkmeyer is the CTO, and Andrew Gillies the COO, in charge of product development. Crowdfunding supported the first 1,000 Dashes, which “fold up like origami” from a flat sheet for easy assembly and feature reprogrammable, Arduino-compatible circuitry; they’re fun, sophisticated and, at $50 each, a bargain.
The Dash Robotics team came together as graduate students in EECS’s Biomimetic Millisystems Lab, creating minirobots inspired by birds that fly; geckos that climb straight up walls and cross ceilings upside down; and fast, agile, nearly unbreakable cockroaches. It was Paul Birkmeyer’s idea to make a cockroach-like — but much cuter — remote-controlled running robot, its structural parts cut from a flat sandwich of flexible plastic and poster board. Teammate Nick Kohut says that when they put on demonstrations at middle schools, “The kids went nuts.” An educational-toy startup was born, hampered only because “we’re engineers; we could do lots of stuff, but we had no business experience.” The Foundry@CITRIS connected the dots with advice, seed money and access to work space and rapid prototyping. Then it came time to get formal: each member jotted down, in secret, who should do what. They agreed perfectly, says Kohut, who became CEO and handles external relations. Birkmeyer is the CTO, and Andrew Gillies the COO, in charge of product development. Crowdfunding supported the first 1,000 Dashes, which “fold up like origami” from a flat sheet for easy assembly and feature reprogrammable, Arduino-compatible circuitry; they’re fun, sophisticated and, at $50 each, a bargain.