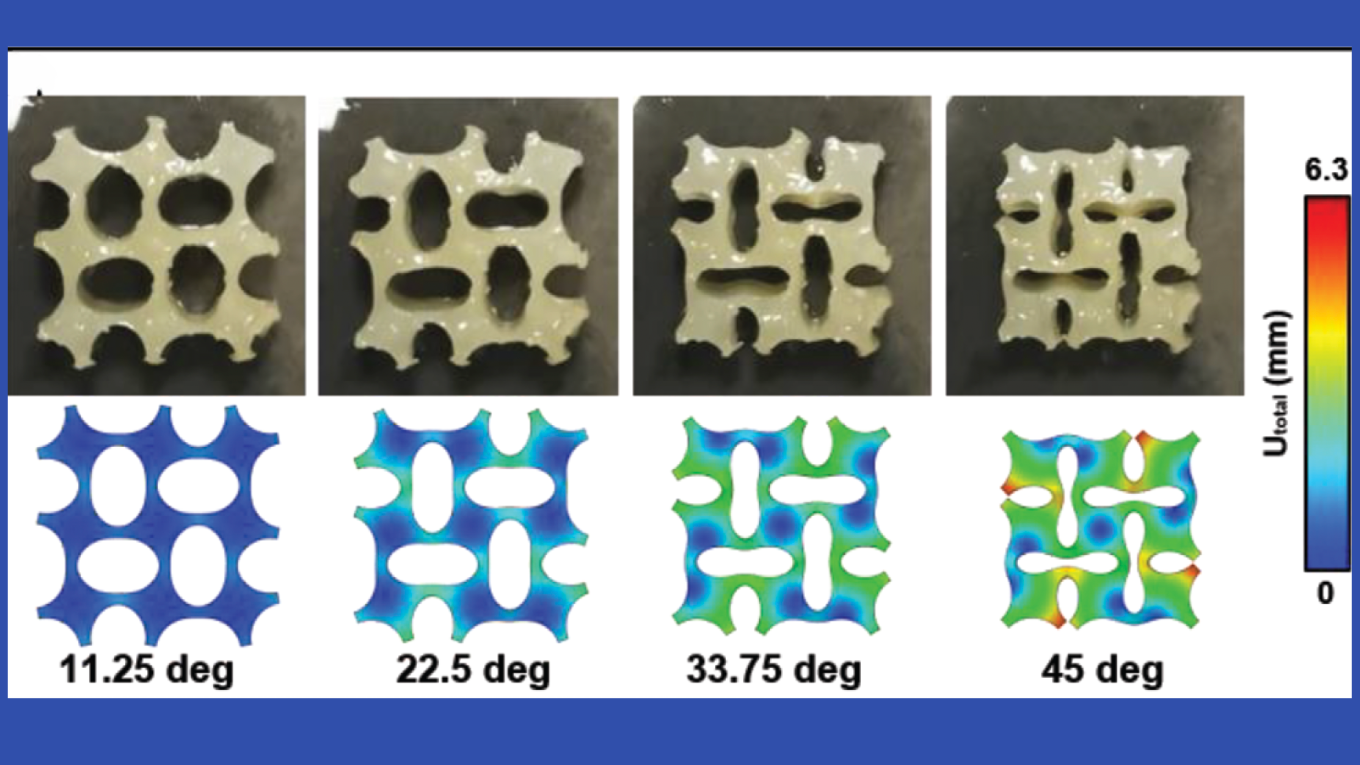
 The bioinspired soft actuator can change shape under different external magnetic fields. Recorded (top row) and computed (bottom row) deformation of the actuator for contraction during four representative stages. (Image courtesy of Wei Yue)
The bioinspired soft actuator can change shape under different external magnetic fields. Recorded (top row) and computed (bottom row) deformation of the actuator for contraction during four representative stages. (Image courtesy of Wei Yue)Researchers design soft actuators that mimic ‘bone-in-flesh’ structure of human limbs
Berkeley engineers have developed magnetically controlled soft actuators that mimic the “bone-in-flesh” structure of human limbs. Ultrafast and highly precise in their movements, these bioinspired actuators are easily made with low-cost, off-the-shelf components — qualities that may lead to their expanded use in soft robotics systems.
In a study published in the journal Advanced Functional Materials, a team of researchers led by Liwei Lin, the James Marshall Wells Professor in the Department of Mechanical Engineering and co-director of the Berkeley Sensor and Actuator Center, designed a “bone-in-flesh” construct that uses hard, permanent magnets for the actuator’s core “bone” structure and soft polymer for its covered “flesh” material.
“By mimicking the nature-inspired ‘bone-in-flesh’ construct, we achieved three desirable qualities in one shot: rapid and precise actuation, excellent resistance to mechanical impacts, and simple fabrication steps,” said co-lead author Renxiao Xu (Ph.D.’20 ME). “We also blended recent advances in mechanics and metamaterials with our actuators to realize unique deformation patterns, including auxetic expanding and shrinking, 2D-to-3D transformation, and switching between different stable states.”

Actuators are devices that convert an input signal — such as light, heat or magnetism — into mechanical energy. Soft actuators, which are encased in pliable, rubbery materials, can safely interact with biological tissues and possess unique mechanical properties that make them ideal building blocks for surgical robots, wearable devices, augmented reality gadgets and human-machine interfaces.
Past generations of soft actuators — designed to respond to light, heat and chemical reactions — typically exhibited slow actuation times and limited precision. Newer magnetically controlled soft actuators perform better in these areas, but they are challenging to manufacture. Ferromagnetic particles with controlled directional magnetization must be embedded into the actuator’s polymer skin, a process that requires specialized 3D printers and lithography techniques.
Now, Lin’s team may have solved this issue. Using their bone-in-flesh design, the researchers were able to make their actuators with low-cost, commercial, off-the-shelf neodymium magnets and elastomers, and a standard FDM (fused deposition modeling) 3D printer.
In addition, they used a simple fabrication process. After mixing Ecoflex, a biopolymer material, they poured it into a 3D-printed ABS mold and cured it at room temperature for 30 minutes. They then removed the cured Ecoflex “flesh” from the mold, inserted the magnetic “bones” and sealed off the insertion cavities with more Ecoflex.
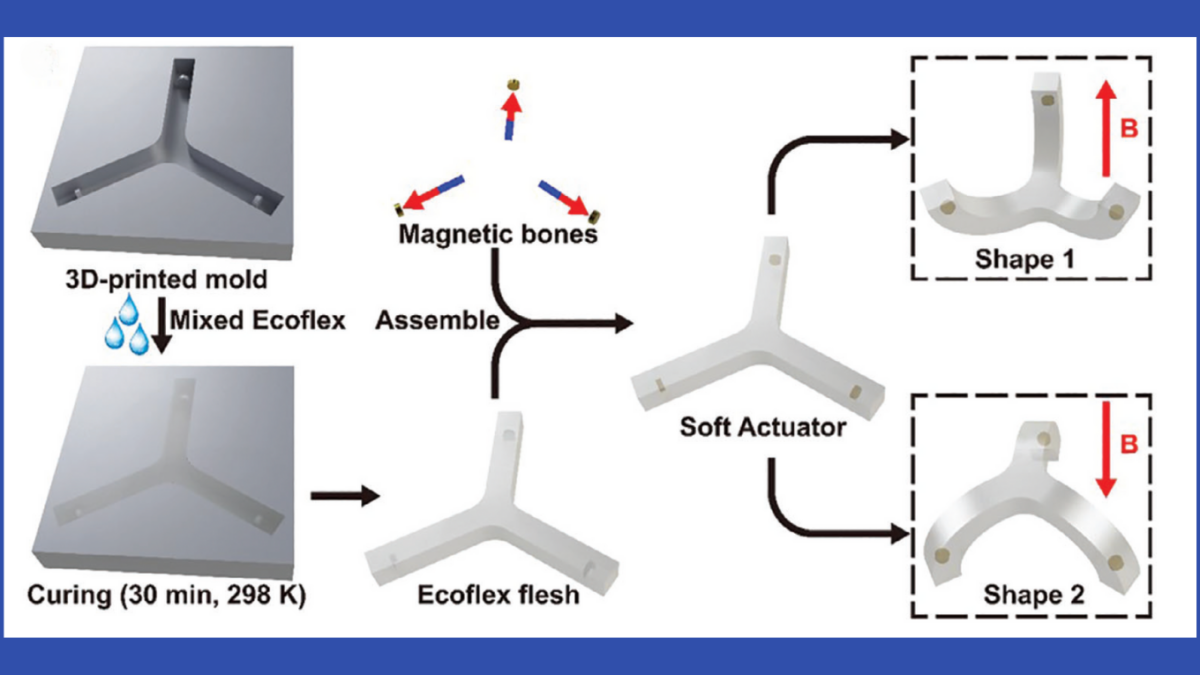
Fabrication procedures of bone-in-flesh soft actuators. (Image courtesy of Wei Yue)
With fabrication no longer a constraint, magnetically controlled soft actuators may offer a practical option for a wide range of applications in the biomedical, consumer electronics and industrial electronics fields. And because these soft actuators are untethered — not limited by physical connections like wires — they have greater freedom of movement and can operate in environments with complex turns and paths.
The team’s magnetic soft actuators also proved to be “very fast and precise” in performance and reliability tests. “They were able to complete a series of tasks through predesigned deformation paths within a fraction of a second,” said Xu. “This actuation time is equal to, or even faster than, other magnetically controlled soft actuators made with complex techniques.”
Further testing revealed that the actuators could withstand excessive mechanical impacts — a valuable feature for robotics applications, given that sudden drops from considerable height, unexpected collisions with heavy objects, and applied distributed loads are common occurrences.
To test the actuator’s impact resistance, the researchers dropped a heavy ball on it from a height of 30 centimeters. Even though the ball was over 1,000 times heavier than it, the actuator bounced around and quickly reverted to its original form. “We knew that our actuators were good at resisting impacts before this test, but the fact that it can recover from such an extreme impact is still a surprise to us,” said Xu.
The researchers then leveraged advances in mechanics and metamaterials to create four classes of magnetic soft actuators with the bone-in-flesh construct. Each exhibited a distinct or novel mechanical property with various potential applications.
The first class, made of auxetic metamaterials, expands and contracts in all directions when exposed to a magnetic field. The next class transforms from a 2D to a 3D origami-like shape.
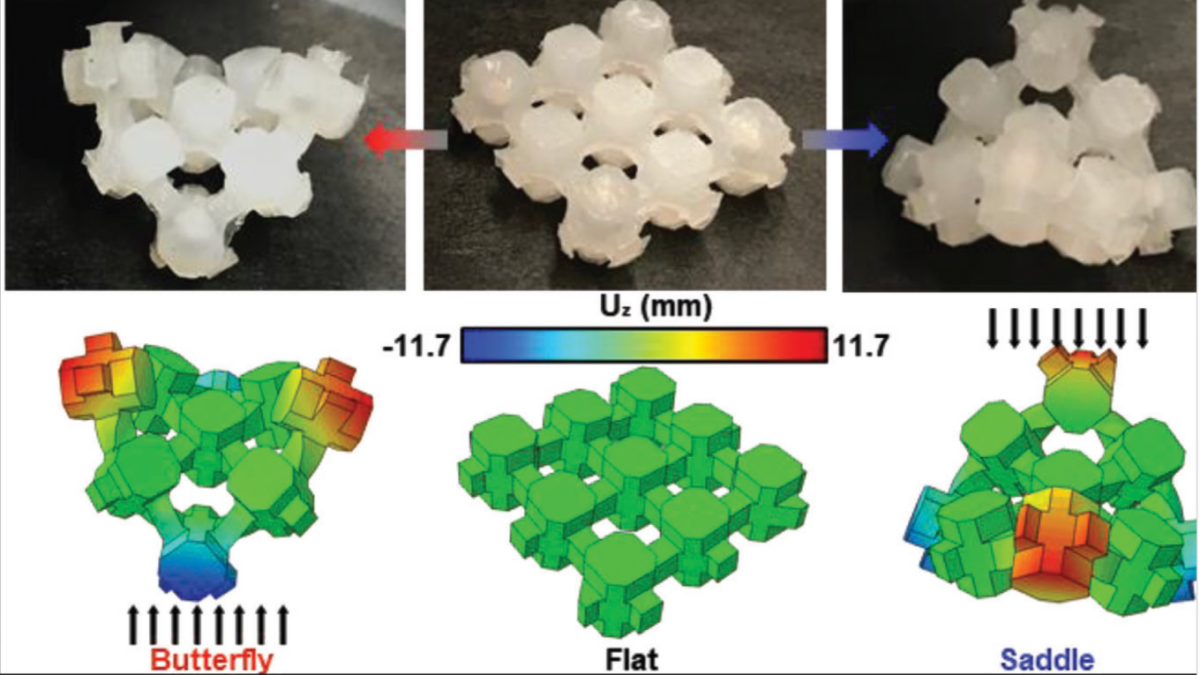
The fabricated soft actuator transforming into different shapes under different external magnetic fields. Recorded (top column) and computed (bottom column) transitions among the “butterfly” state, the undeformed flat state and the “saddle” state. (Image courtesy of Wei Yue)
A third class of actuators, built on bistable and multistable structures, acts like a switch that can be “locked” into an on or off position. According to the researchers, this change of states brings bone-in-flesh actuators a step closer to imitating biological structures with multiple joints in a series, like a human hand, where each joint can reset in either flexed or extended positions.
And the fourth class, a six-fingered soft gripper, can tighten, open and adapt its grasp to different objects to avoid applying excessive pressure.
Looking ahead, Lin’s team views their bioinspired design as a step toward potentially expanding the capabilities of humanoid robots.
“A future goal is to develop soft robots with the complexity and efficiency of a human body,” said co-lead author Wei Yue, a graduate student researcher. “The bone-in-flesh actuators illustrate a path forward in future research and applications, as they blend speed and precision with good adaptability and durability of ‘soft’ biological entities.”
The study’s other co-authors are Fanping Sui (M.S.’19, Ph.D.’22 ME) and graduate student researcher Yuan Gao.